Plenary sessions
Monday September 17, 2007 |
|||
| Plenary session 1 | MAV Design, Aerodynamics & Propulsion |
||
| Chaired by : C. BOLLER | University of Sheffield, Leeds, UK | ||
Aerodynamics of VTOL Micro Air Vehicles |
|||
S. Shkarayev University of Arizona, Tucson, AZ |
|||
J.-M. Moschetta and B. Bataillé SUPAERO, Toulouse, France |
|||
| Download : Presentation | |||
Plasma Flow Control at MAV Reynolds Numbers |
|||
B. Göksel |
|
||
D. Greenblatt, I. Rechenberg, R. Bannasch, C. O. Paschereit
|
|||
| Download : | |||
Presentation of the MAVDEM project |
|||
|
ONERA, Chatillon, France |
|||
| Download : Presentation | |||
| Plenary session 2 | MAV Navigation and Mission Planning |
||
| Chaired by : P. VÖRSMANN | Technische Universität Braunschweig, Germany | ||
APath Planning for a Fixed Wing Micro Air Vehicle in Fuzzy Quadtree Framework |
|||
 |
S. Ghosh, A. Halder and M. Sinha Indian Institute of Technology (IIT), Kharagpur, India |
||
| Download : Presentation | |||
A Simple and Robust Fixed- Wing Platform for Outdoor Flying Robot Experiments |
|||
 |
T. Krüger, J. Axmann and P. Vörsmann Technische Universität Braunschweig, Germany. |
||
L. Krüger Mavionics, Braunschweig, Germany |
|||
A. Kuhn Andata Development Technologies, Hallein, Austria |
|||
| Download : Presentation | |||
Soaring behaviors in UAVs : 'animat' design methodology and current results |
|||
S. Doncieux, G. Tatur, J.-B. Mouret and J.-A. Meyer Institut des Systèmes Intelligents et Robotique, LIP6, Paris, France |
|||
| Download : Presentation | |||
Tuesday September 18, 2007 |
|||
| Plenary session 3 | Flapping-wing MAVs, fluid-structure interaction |
||
| Chaired by : C. BOLLER | University of Sheffield, Leeds, UK | ||
Experimental Elastic Deformation Characterization of a Flapping-Wing MAV using Visual Image Correlation |
|||
K. Stewart, R. Albertani University of Florida, Shalimar, FL USA |
|||
| Download : Presentation | |||
The Use of Resonant Structures for Miniaturizing FMAVs |
|||
C. Bolsman, H. Goosen, R. Munnig Schmidt and F. van Keulen Delft University of Technology, The Netherlands |
|||
B. Palsson Chalmers University of Technology, Sweden |
|||
| Download : Presentation | |||
Unsteady Mechanical Aspects of Flexible Wings: an Experimental Investigation Applied to Biologically Inspired MAVs. |
|||
R. Albertani, B. Stanford and P. Ifju University of Florida, Gainesville, FL USA |
|||
| Download : Presentation | |||
Thursday September 20, 2007 |
|||
| Plenary session 4 | Sense and Avoid, Autopilots for MAV System |
||
| Chaired by : T. HAMEL | I3S, UNSA-CNRS, Nice, France | ||
Flight Controller Design and Autonomous Flight Tests of 60cm-sized UAV |
|||
J. Fujinaga, H. Tokutake and S. Sunada Osaka Prefecture University, Japan |
|||
| Download : Presentation | |||
Strategies for the Implementation of a Sense and Avoid System for Unmanned Aerial Vehicles |
|||
J. B. Park and P. Vörsmann Technische Universität Braunschweig, Braunschweig, Germany |
|||
| Download : Presentation | |||
Design concepts for a novel attitude sensor for Micro Aerial Vehicles based on dragonfly ocellar vision |
|||
G. Stange, R. Berry and J. van Kleef Australian National University, Canberra, Australia |
|||
| Download : Presentation | |||
| Plenary session 5 | Flapping-MAVs, Flight Control and Navigation |
||
| Chaired by : J. A. MULDER | Delft University of Technology, The Netherlands | ||
A Dynamic Model and System Identification Procedure for the Autonomous Ornithopter |
|||
B. Malladi, R. Krashanitsa, D. Silin and S. Shkarayev University of Florida, Tucson, FL USA |
|||
| Download : Presentation | Video (1)
|
||
Flapping-wing flight in birdsized UAVs for the ROBUR project: from an evolutionary optimization to a real flappingwing mechanism |
|||
 |
E. de Margerie, J.-B. Mouret Institut des Systèmes Intelligents et Robotique, LIP6, Paris |
||
T. Ravasi, P. Martinelli and C. Grand, Institut Grand, Institut Universitaire de Technologie de Cachan, France |
|||
| Download : Presentation | |||
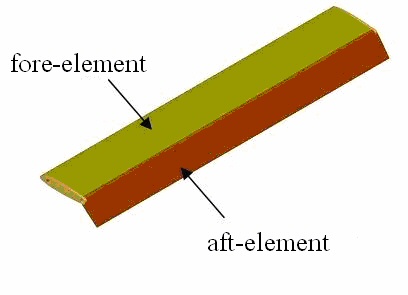
Experimental investigation on the aft-element flapping of a two-element airfoil at high attack angle |
|||
T. Guang-kun, S. Gong-Xin and S. Wen-han Beijing University of Aeronautics and Astronautics (BUAA), Beijing, China |
|||
| Download : Presentation | |||
Friday September 21, 2007 |
|||
| Plenary session 6 | Rotary-wing MAV Systems |
||
| Chaired by : P. DOHERTY | Linköping University, Sweden | ||
Rotorcraft Using Minimal Sensing For Fully Autonomous Control |
|||
J. Roberts, T. Stirling, J.-C. Zufferey and D. Floreano Laboratory of Intelligent Systems, Ecole Polytechnique de Lausanne (EPFL), Lausanne, Switzerland |
|||
| Download : Presentation | |||
Modeling and development of a quadrotor UAV |
|||
G. Pradel, K. Benzemrane, G. Damm, N. Azouz Informatique, Biologie Intégrative et Systèmes Complexes (IBISC), Université d’Evry, Evry, France |
|||
| Download : Presentation | |||
Nonlinear Attitude and Position Control of a Micro Quadrotor using Sliding Mode and Backstepping techniques |
|||
P. Adigbli Institute of Automatic Control Engineering, Technische Universität München, Germany |
|||
J.-B. Mouret, S. Doncieux, J.-A. Arcady Institut des Systèmes Intelligents et Robotique, LIP6, Paris |
|||
| Download : Presentation | |||