Flight presentations
Two challenging missions will be open to MAVs of which the maximum dimension is 500 mm and maximum weight is 500 grams. Competitors are welcome to take part to either or both flight sessions. There is no requirement to use the same vehicle for the outdoor and the indoor missions.
For the two missions, the competitors will have to follow General Rules (also available as a PDF file)
Outdoor flight session
The outdoor flight session will consist of flying an MAV over two separate 1.2X1.5- meter placards within a 1 kilometer radius and identify them. A third identified placard will have to be accurately located within a given area. A circular platform of 1.2-meter diameter will be placed at 1.5m from the ground to demonstrate vertical take-off and landing capabilities of rotorcraft MAVs. Finally, the MAV will have to fly through an urban canyon made of two balloon arches before landing in a predefined zone.
click on zones to see details
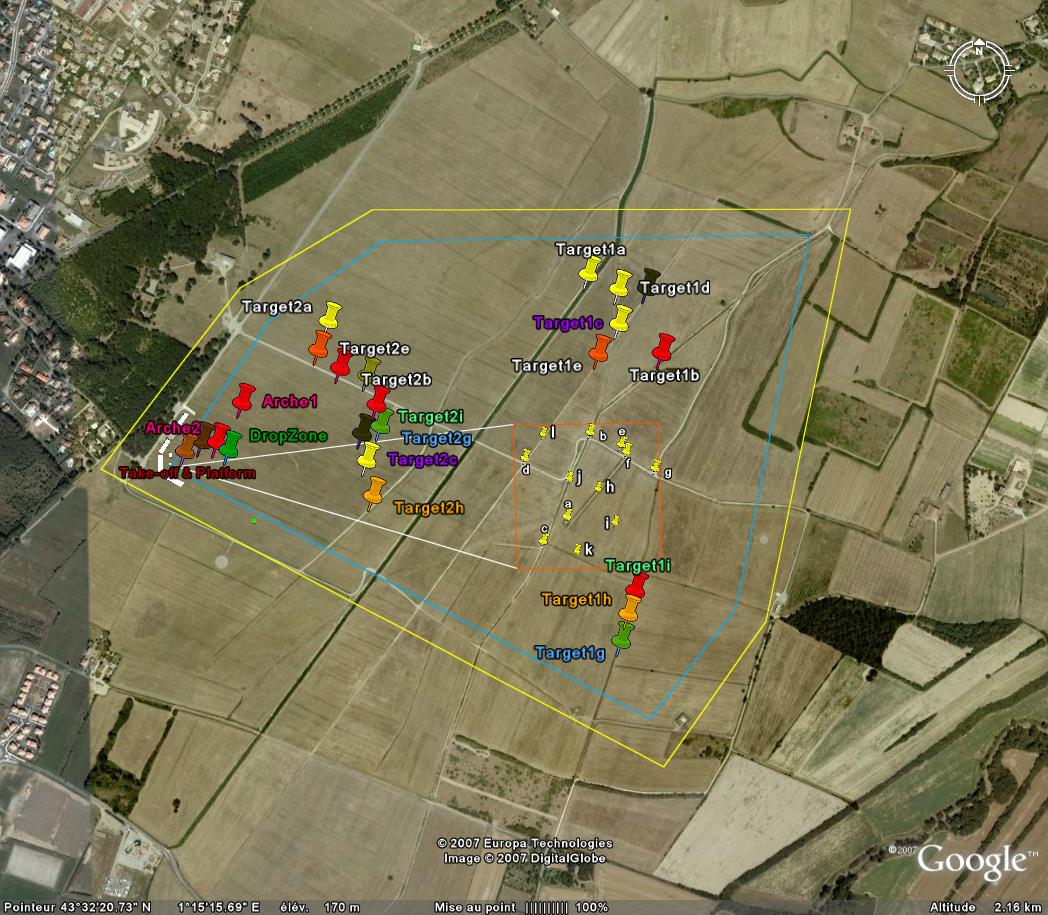
locate on Google Earth or map (Download Google Earth Free)

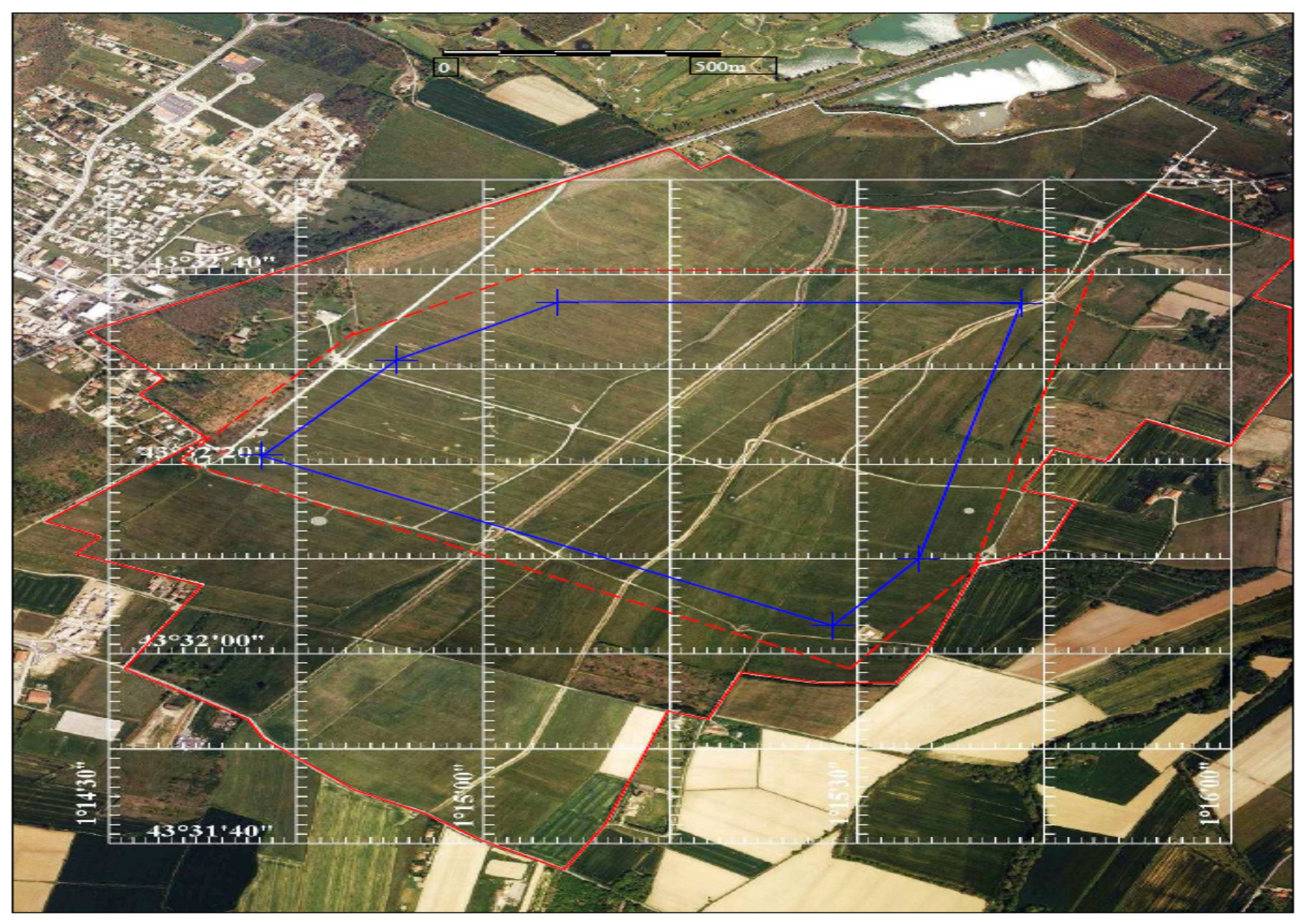
Fonsorbes (DGA Airfield) installation for Outdoor flying session
 |
 |
 |
Installation for teams |
Giant screen to see all the flights |
Installation for judges |
 |
 |
 |
Recuperation vehicle |
||
 |
 |
 |
All terrain vehicle Outdoor Task 3 |
Landing platform Outdoor Task 6 |
Arches layout |
Outdoor-mission / Outdoor-layout / Outdoor-scoring-sheet / Scoring&Rules
- The sensor to drop is a classical paintball (weight: 3.5 grams ; diameter: 17 mm).
- The working time is 20 minutes
- Targets to be identified will be characters of the roman alphabet, printed in Arial Bold font, about 80cm high.
Safety Regulation
For the outdoor mission, the authorized frequencies are the following:
26 MHz, 41 MHz, 72 MHz: max power 100 mW
2.4 GHz and 868 MHz: max power 500 mW
All micro air vehicles must be equipped with safety devices which allow the pilot to keep full control of the MAV at any time during the flight by switching back to manual mode through a priority uplink.
All MAVs must be equipped with an on-board GPS receiver and a transmitter which sends GPS coordinates in real-time mode down to the ground station.
A flight zone will be defined in advance. During the outdoor flight session (outdoor competition or outdoor technical demonstrations), all MAVs should remain within the limits of the flight zone. If a MAV crosses the borders of the flight zone, the pilot must immediately switch off the motor.
The flight zone is inside a security zone. A MAV must never get out of this zone (even when the motor is off). So the flight zone must be computed from the coordinates of the security zone according to the performances of the MAV and the wind (e.g. a glider would have a smaller flight zone than a rotorcraft). The coordinates of the security zone (displayed in the Google Map & in this picture) are given in the following table:
| Lat (deg) | Long (deg) |
| 43.5389 | 1.2433 |
| 43.5425 | 1.2469 |
| 43.5447 | 1.2511 |
| 43.5447 | 1.2636 |
| 43.5358 | 1.2608 |
| 43.5328 | 1.2581 |
Outdoor Judges panel
![]() Gregg ABATE, US Air Force Research Laboratory Munitions Directorate, FL, USA
Gregg ABATE, US Air Force Research Laboratory Munitions Directorate, FL, USA
![]() Nicolas DUFETELLE, UAV Executive, French MoD Procurement Agency (DGA), France
Nicolas DUFETELLE, UAV Executive, French MoD Procurement Agency (DGA), France
![]() Patrick FABIANI, Head of Control & Flight Dynamics Dept, ONERA, France
Patrick FABIANI, Head of Control & Flight Dynamics Dept, ONERA, France
![]() Tim McLAIN, Chair of Dept of Mechanical Engineering, Brigham Young University, UT, USA
Tim McLAIN, Chair of Dept of Mechanical Engineering, Brigham Young University, UT, USA
![]() Evgeny SOKOLOV, Head of Laboratory, Central Research and Developing Institute of Robotics and Technical Cybernetics, Russia
Evgeny SOKOLOV, Head of Laboratory, Central Research and Developing Institute of Robotics and Technical Cybernetics, Russia
 |
 |
 |
Outdoor Judges at work (E. Sokolov, N. Dufetelle, P. Fabiani) |
E. Sokolov & N. Dufetelle |
E. Sokolov interviewed by Pierre Weck, the commentator |
Outdoor flight competition
(SUPAERO audio-video office) Get the video in Hi-resolution, click here
DGAC - CEV Airfield Fonsorbes P. BATAILLE, DGAC, Director of flight operation |
|
Fly rank and teams |
|
1 |
MAC07 Martin Müller, Germany |
2 |
Twisted-Logic ENAC-Miraterre, France-USA |
3 |
STORM1 Istanbul Technical University , Turkey |
4 |
WILDCAT University of Arizona , USA |
5 |
TYTO SUPAERO , France |
6 |
BLACKOUT Brigham Young University , USA |
7 |
GATORS University of Florida, USA |
8 |
SLAYER ENAC , France |
9 |
HOLIDAY 50 AV DELFT University, The Netherlands |
10 |
MAV IUT Isfahan University of Technology , Iran |
11 |
MAVUDES University de Sherbrooke , Canada |
12 |
PINGWING UAV tech Linkoping University , Sweden |
Outdoor technical demonstration
1 |
IUT-MAV Isfahan University of Technology, Iran |
2 |
MANTA Osaka Prefecture University, Japan |
3 |
KU batwing Konkuk University South korea |
 SUPAERO, Toulouse, France
SUPAERO, Toulouse, France

Indoor flight session
The indoor flight session will consist of conducting a spy mission by flying a MAV into a 3.6-meter square room through a 1-meter square window and identify two targets only visible from inside, one located on a table and one posted on a wall. A coat-hanger will be randomly placed in the room to test the obstacle avoidance capability. The operator will have to stay within the launch zone at 10 meters outside the room. Working time is 10 minutes.

 |
 |
 |
 |
 |
 |
Building localisation of tasks. (variable informations on targets. Random choice for each team)
Indoor-mission / Indoor-scoring-sheet / Scoring&Rules
Indoor Judges panel
![]() Aurelia AUTRAN, Mini-UAV system engineer, French MoD Procurement Agency (DGA), France
Aurelia AUTRAN, Mini-UAV system engineer, French MoD Procurement Agency (DGA), France
![]() Christian BOLLER, Professor in Smart Structural Design, University of Sheffield, UK
Christian BOLLER, Professor in Smart Structural Design, University of Sheffield, UK
![]() John JOHNSON, Aviation and Missile Technology, U.S. Army International Technology Center-Atlantic, London, UK
John JOHNSON, Aviation and Missile Technology, U.S. Army International Technology Center-Atlantic, London, UK
![]() Surya SURAMPUDI, European Office of Aerospace Research and Development, UK
Surya SURAMPUDI, European Office of Aerospace Research and Development, UK
![]() Hiroshi TOKUTAKE, Dept of Aerospace Engineering, Osaka Prefecture University, Japan
Hiroshi TOKUTAKE, Dept of Aerospace Engineering, Osaka Prefecture University, Japan
 |
 |
 |
Indor Judges at work (S. Surampudi, J. Johson, C. Boller) |
P. Weck for comment and a competitor : D. Bernard |
Judge control work : Size and weight |
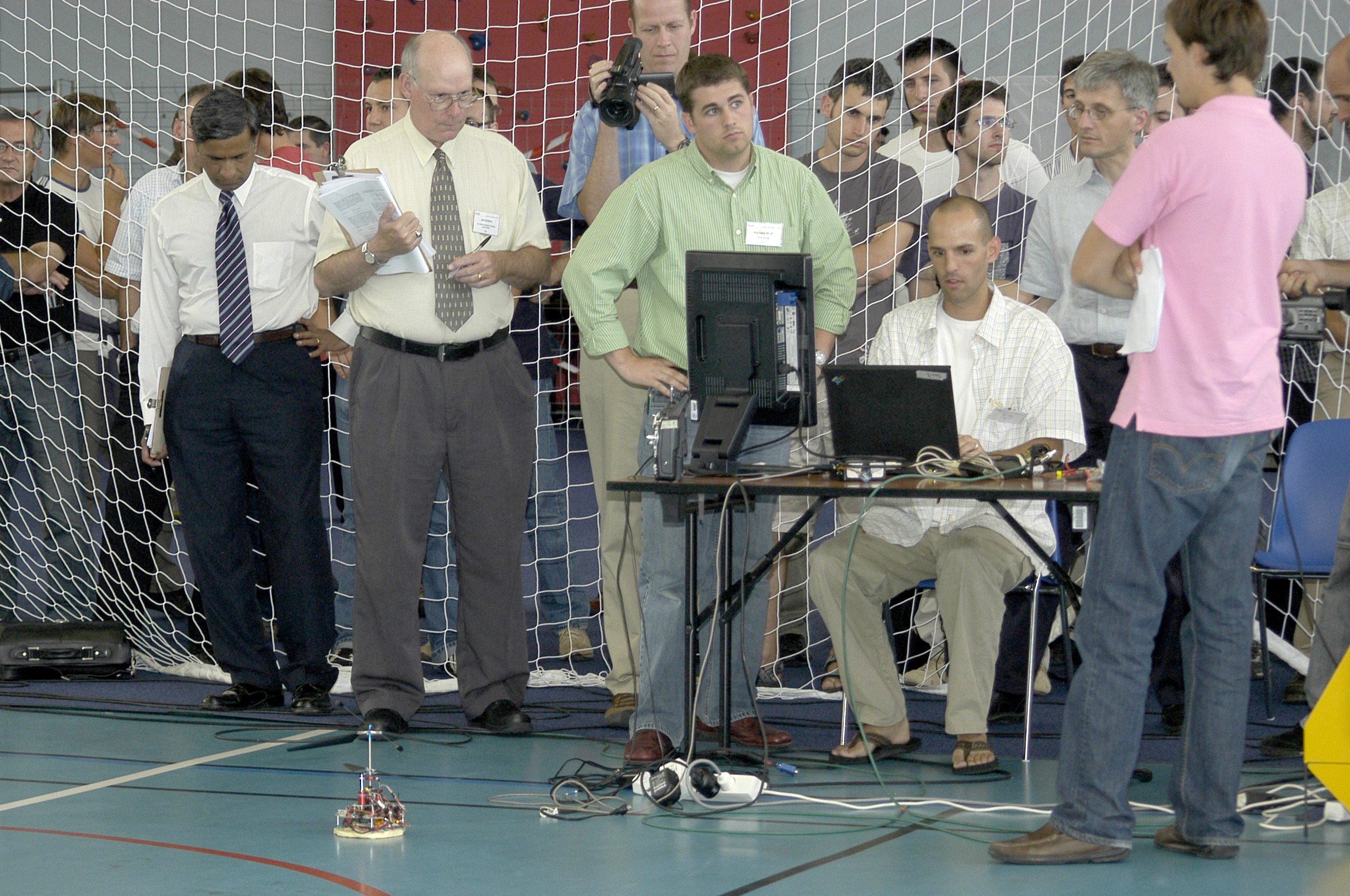
Indoor flight competition
(SUPAERO audio-video office) Get the video in Hi-resolution, click here
SUPAERO Gym hall P. BATAILLE, DGAC, Director of flight operation |
|
Fly rank and teams |
|
1 |
Frenzy Brigham Young University, USA |
2 |
DelflyII Delft University, The Netherlands |
3 |
Twisted-Logic ENAC-Miraterre, France-USA |
4 |
Mini-Vertigo University of Arizona - SUPAERO, USA-France |
5 |
KU-Loiter Konkuk University, Korea |
6 |
Link-MAV Linköping University, Sweden |
7 |
Br2C SUPAERO, France |
8 |
MAC07 Martin Müller, Germany |
9 |
Proxflyer-MAV07 Proxflyer, Norway |
10 |
Vision SUPAERO, France |
11 |
IMA Institut de Maintenance Aéronautique, France |
Indoor technical demonstrations
1 |
Vertigo SUPAERO-ONERA, France |
2 |
VTOL-MAV EPFL, Switzerland |
3 |
KU-Buzz Konkuk University, Korea |
Indoor "Nano Air Vehicle" flight demonstrations
1 |
Micro-X4 Jean-Claude Pesce, France |
2 |
Kolibri University of Arizona, USA |
3 |
Picoflyer II Proxflyer, Norway |
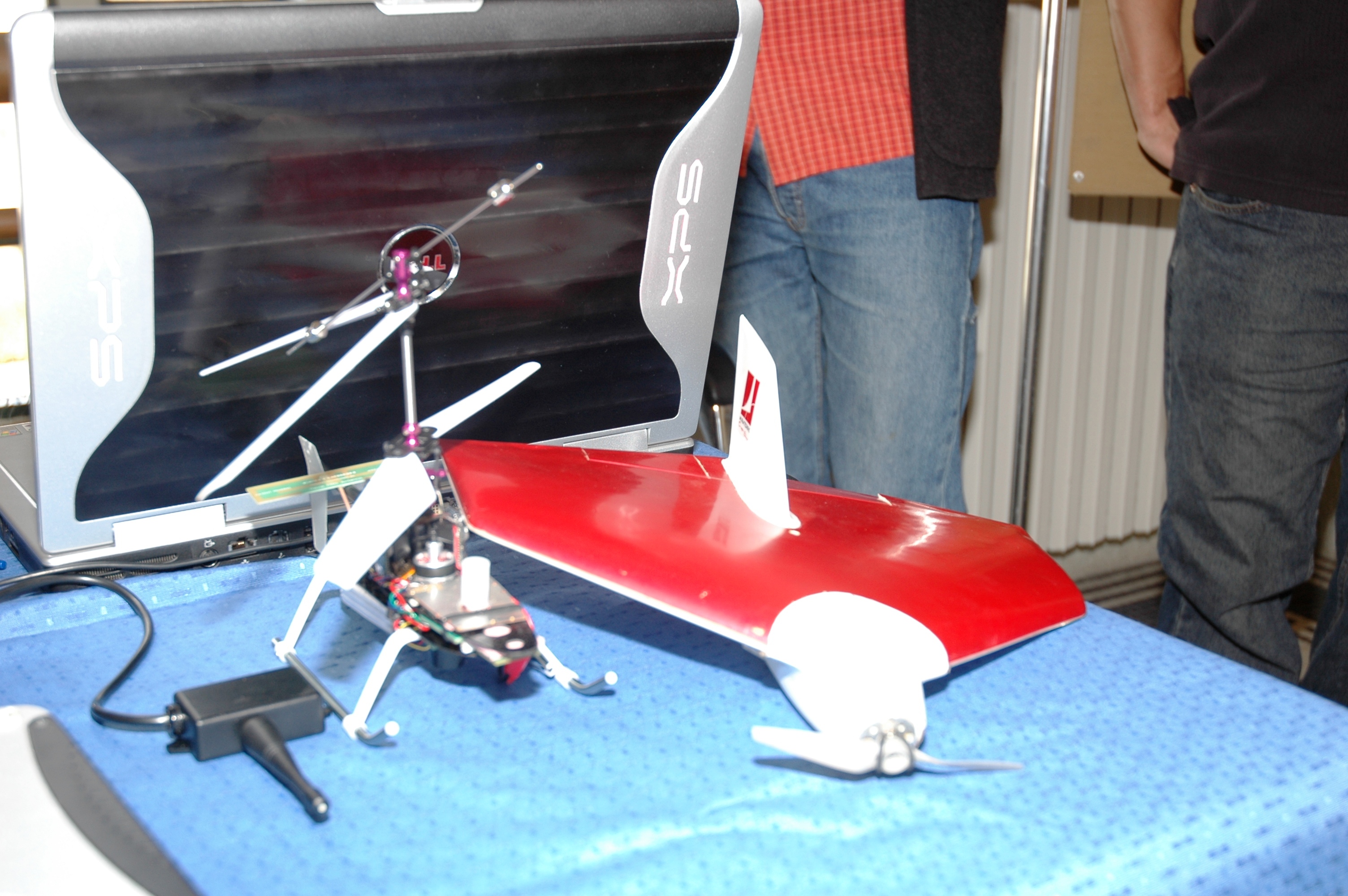
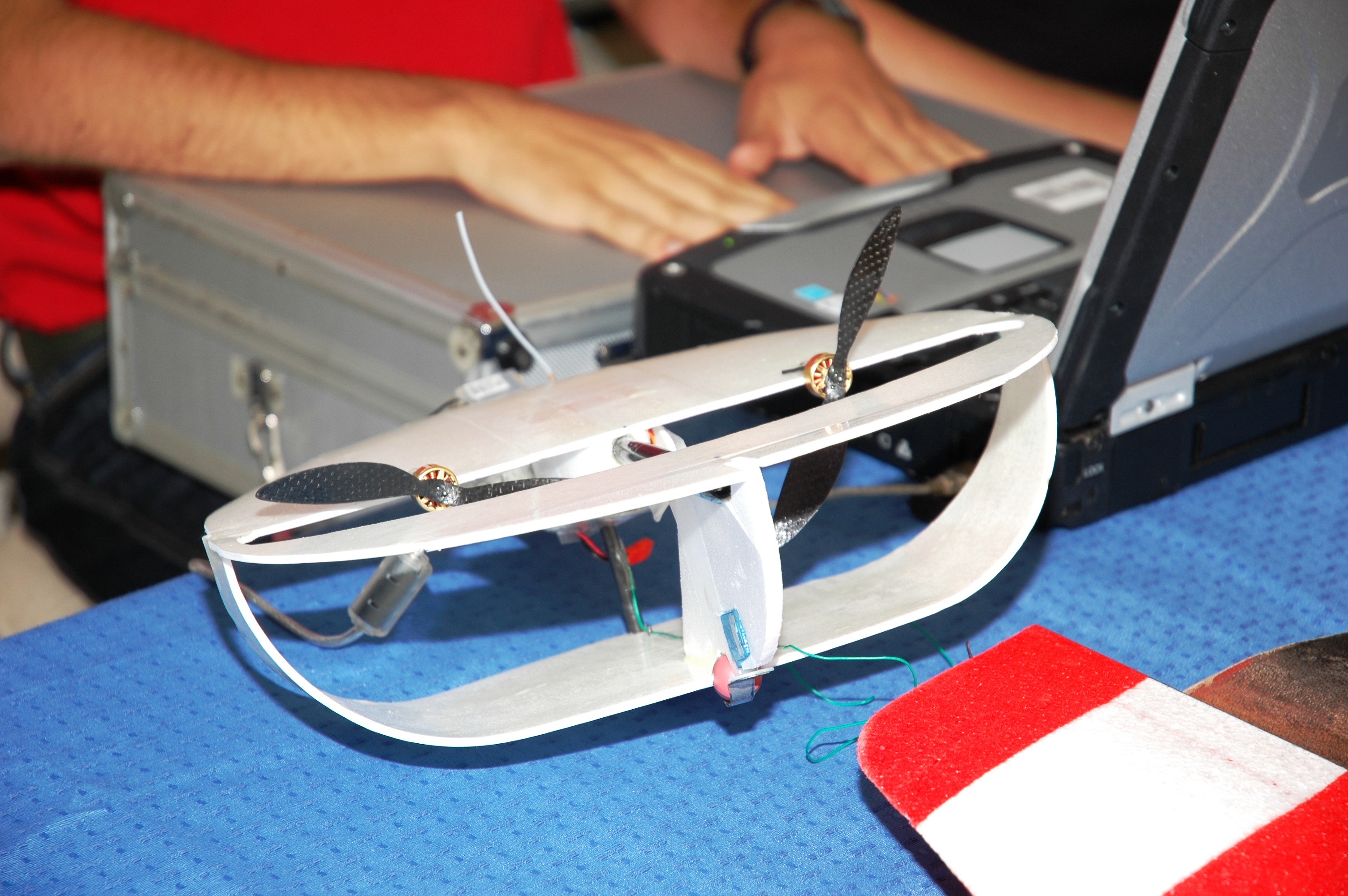
Static exhibition
(SUPAERO Clement Ader hall)
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |

{kind=link}
{kind=link}